News

Liliana Cucu-Grosjean talks about her interest and experience as a woman in CS
© Inria / Photo Raphaël de Bengy Liliana Cucu-Grosjean is a Research Director at the French National Institute in Computer Science and Automation (Inria) in Paris, France, where she leads the Kopernic research team. Her research interests include real-time, embedded and cyber-physical systems with a focus on the use of [...]

Consortium meeting in Lund
ADMORPH partners met this week in Lund, Sweden, for the final consortium meeting. During three days, from the 19th to the 21st of June, the 19 participants physically present (including one advisory board member), plus 3 more online participants (including also one advisory board member), worked towards the preparation of [...]
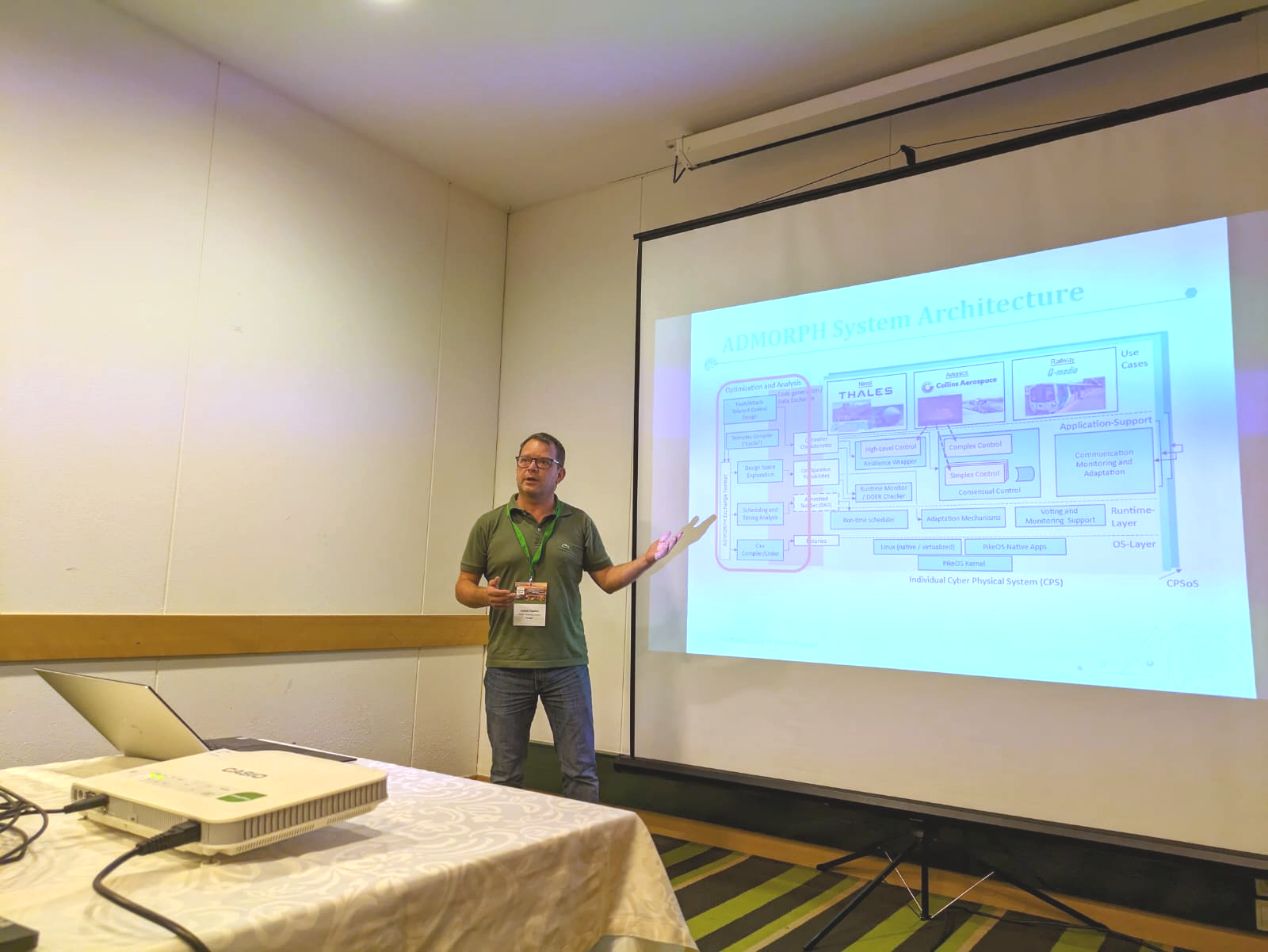
ADMORPH @ DeCPS Workshop
António Casimiro and Georg Jäger presented the ADMORPH project at the 8th DeCPS Workshop on Challenges and New Approaches for Dependable and Cyber-Physical System Engineering, which took place on June 16th, with the 27th Ada-Europe International Conference on Reliable Software Technologies, in Lisbon, Portugal. Other EU-H2020 projects were also present [...]

Inaugural lecture by Andy Pimentel
Andy Pimentel, ADMORPH coordinator, finally got to celebrate his appointment as full Professor of Embedded Computer Systems at the University of Amsterdam with his inaugural lecture. This celebration had been postponed due to the COVID-19 pandemics, so the lecture only took place on May 31st. The lecture (in Dutch) was [...]
Interview series with our Industrial Partners: SYSGO
We conducted this interview with SYSGO SAS (José Almeida) and SYSGO GmbH (Mario Brotz) Considering your company's area of activity, what was your motivation to participate in H2020 project ADMORPH? José: We are one of the leading producers of high-assurance embedded systems in Europe, in particular we provide a small-codebase [...]
Interview series with our Industrial Partners: Thales
Considering your company's area of activity, what was your motivation to participate in H2020 project ADMORPH? Thales Nederland B.V. has been involved in the development of surveillance systems, both for civil and military purposes, since the early days of radar technology. This gives the company the know-how to build all [...]
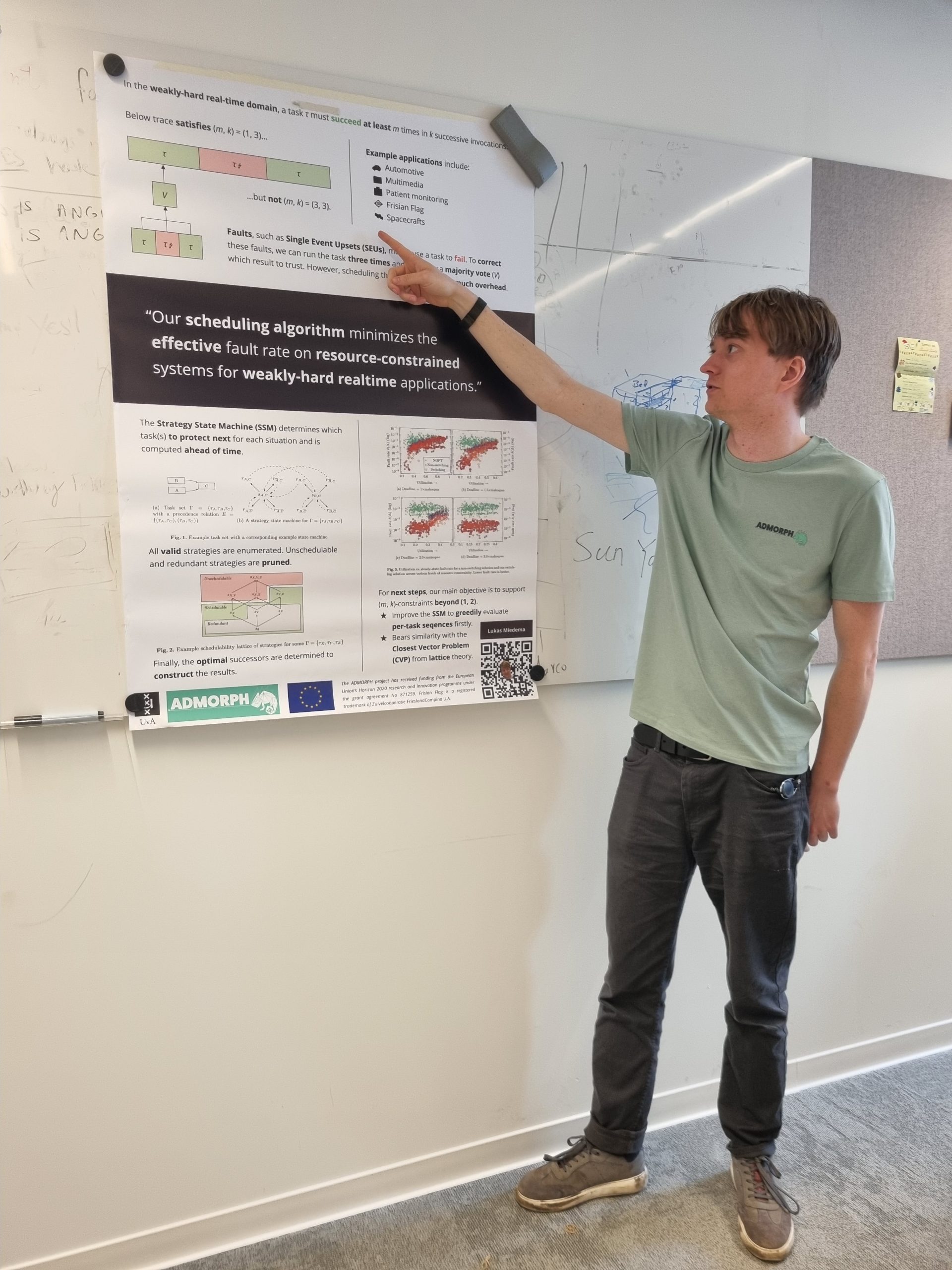
ADMORPH poster at ICT OPEN
Lukas Miedema, researcher at the University of Amsterdam, presented a poster about his work at ICT OPEN, which took place in Utrecht, Netherlands, on April 19-20, 2023. The presented work, focusing on the Weakly-Hard real-time applications, provides scheduling algorithm that lead to a reduced and minimized application fault rate. The [...]
ADMORPH papers at AEiC’23
Three ADMORPH-related papers were accepted at the WiP track of the 27th Ada-Europe International Conference on Reliable Software Technologies (AEiC 2023). The conference will be in Lisbon, Portugal, from June 13-16, and hence ADMORPH will be well represented. The accepted papers are the following. The paper entitled "Software-based Security Approach [...]

Researchers tie their tools together
For three days at the end of February, researchers of two academic partners of the project met at Science Park in Amsterdam. Dolly Sapra and Lukas Miedema from the Parallel Computing Systems group of the University of Amsterdam, and Florian Haas from the Embedded Systems group of the University of [...]

ADMORPH Consortium Meeting in Augsburg
The 7th ADMORPH Consortium Meeting took place from the 6th to the 8th February, in Augsburg, Germany. During the meeting it was possible to address ongoing activities, present the status of demonstrations being prepared, and discuss technical aspects in detail, during break-out sessions involving different sets of partners. As usual, [...]