News

The ADMORPH Railway System Use Case
Overview Our goal with the Railway System Use Case is to exploit ADMORPH tools to create robust and reliable communication between the train and the ground part of the railway system. The data transmission system between the train and the ground part of the operator's system consists of a pair of [...]

Paper accepted to IEEE Control Systems Letters
A new ADMORPH paper has been accepted for publication. The paper, entitled "Stability of Linear Systems under Extended Weakly-Hard Constraints", will appear in IEEE Control Systems Letters, a highly ranked journal (Scimago Q1). The paper proposes a comprehensive stability analysis for control systems subject to deadline misses bounded by the [...]

ADMORPH at HiPEAC’22, in Budapest
The ADMORPH project was present at the HiPEAC 2022 Conference, which took place in Budapest, Hungary, from 20 to 22 of June. ADMORPH posters were visible in the coffee-break area throughout the entire event, while an ADMORPH flyer highlighting the project vision, objective, use cases and architecture and technologies, was [...]

Marine Kadar talks about her interest and experience as a woman in CS
Marine Kadar works as project research engineer at SYSGO. She received her PhD from the Real-Time Systems Chair of TU Kaiserslautern in 2022. Her PhD study applied in the scope of FORA, a European training network in Horizon 2020 Research and Innovation project. She investigated how to develop and deploy intrusion [...]
ADMORPH Consortium Meeting in Lisbon
Finally, after two years of virtual meetings due to the COVID-19 pandemic, the #ADMORPH project partners were able to physically meet once again! The consortium meeting took place at the Faculty of Sciences of the University of Lisbon, in Portugal, from the 11th to 13th of May. During the meeting [...]
New ADMORPH promotional video
Want to know about the ADMORPH EU project? Check the promotional video that has been just released, which is available on the ADMORPH YouTube channel.
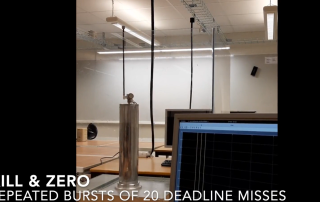
Stability and Performance Analysis of Control Systems Subject to Bursts of Deadline Misses
Computation is becoming cheaper and cheaper, with a lot of dedicated core capacity. Because of this, we are plugging in components in our control systems, like anomaly detector and predictive maintenance algorithms, that can help us take better advantage of the computational power for something useful. However, this additional load [...]

Cristiana Bolchini talks about her interest and experience as a woman in CS
Cristiana Bolchini is a Professor at the Dipartimento di Elettronica, Informazione e Bioningegneria of Politecnico di Milano, where she received a PhD in Automation and Computer Science Engineering in 1997. Her research interests are in methodologies for the design and analysis of computing/embedded systems with a particular focus on dependability aspects. [...]

ADMORPH participation at DATE’21
ADMORPH had a strong presence in the organization of a panel session at the ASD Autonomous Systems Design initiative, in the scope of the DATE 2021 conference. The session, under the theme “Self-adaptive safety- and mission-critical CPS: wishful thinking or absolute necessity?” was organized by ADMORPH researchers Martina Maggio and [...]
Adaptive Design of Real-Time Control Systems subject to Sporadic Overruns
In ADMORPH, we look at the guarantees that we can provide for embedded systems that do not behave as we expect them to do. One of this unexpected behaviour manifests itself as deadline misses. In particular, control tasks that miss their deadlines can be dangerous and potentially create trouble (think about [...]